|
|
|
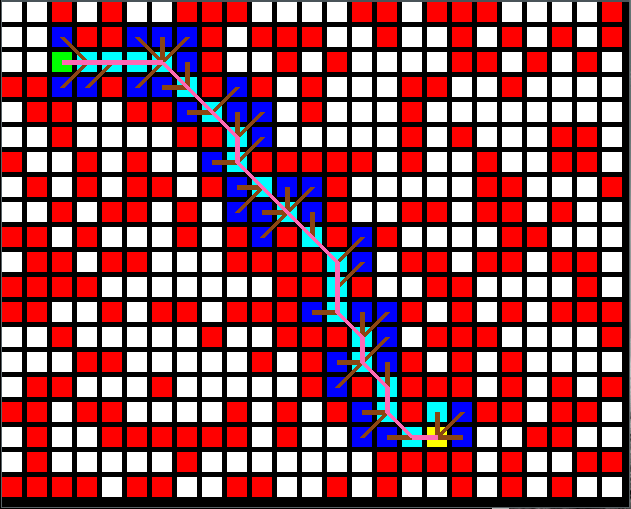
This project implements and displays the AStar Algorithm. AStar is a computer algorithm that is widely used in pathfinding and graph traversal, the process of plotting an efficiently directed path between multiple points, called nodes.
Red colored blocks represents: unwalkable path
White colored blocks represents: walkable path
Yellow colored block represents: start node
Green colored block represents: goal node
Teal/Light Blue colored blocks represents: calculated nodes (nodes that have been added to the closed list)
Dark Blue colored blocks represents: uncalculated nodes (nodes that are still in the open list)
Brown colored lines represents: parent nodes
Pink colored line represents: most efficient cost path